
AI, Machine Learning, and Big Data Analytics
Sponsor: Transportation Research Board, The National Academies
PI: Mecit Cetin; CoPIs: Sherif Ishak
Description: The main objective of this research is to advance the understanding and use of ML tools and techniques at state DOTs and other
transportation agencies. This will be accomplished by:
PI: Mecit Cetin; CoPIs: Sherif Ishak
Description: The main objective of this research is to advance the understanding and use of ML tools and techniques at state DOTs and other
transportation agencies. This will be accomplished by:
- Demonstrating the opportunities and benefits offered by ML in the context of transportation systems, i.e., matching high value state DOT needs with mature, deployable ML concepts.
- Describing the development and implementation processes, data requirements, performance metrics and evaluation for ML methods.
- Identifying skills, capabilities, resources, and organizational capacities necessary to leverage
- ML in the transportation workforce and evolution of workplace.
- Documenting existing ML applications at transportation agencies and providing a detailed account of their experience with ML.
- Providing insight into costs, benefits, performance, and limitations.
- Compiling and sharing available ML frameworks, tools, and code for common use cases.
- Creating a guidance document outlining the key considerations in developing and adopting ML applications.
Scalable Modeling and Adaptive Real-time Trust-based Communication (SMARTc) System for Roadway Inundations in Flood-Prone Communities

Sponsor: National Science Foundation (NSF)
PI: Khan M. Iftekharuddin; CoPIs: Mecit Cetin, Navid Tahvildari, Jing Chen (ODU), and Jon Goodall (UVA)
Description: In this project funded by the NSF's Smart and Connected Communities (S&CC) program, we will develop new machine learning and computer vision algorithms to detect floodwater on roadways based on images from surveillance cameras. The impacts of flooding on roadway capacity and traffic will be estimated in real-time. The project will advance flood warning systems in communities facing rising sea levels and frequent flooding. More information can be found here.
PI: Khan M. Iftekharuddin; CoPIs: Mecit Cetin, Navid Tahvildari, Jing Chen (ODU), and Jon Goodall (UVA)
Description: In this project funded by the NSF's Smart and Connected Communities (S&CC) program, we will develop new machine learning and computer vision algorithms to detect floodwater on roadways based on images from surveillance cameras. The impacts of flooding on roadway capacity and traffic will be estimated in real-time. The project will advance flood warning systems in communities facing rising sea levels and frequent flooding. More information can be found here.
Effectiveness of TMC AI Applications in Case Studies
Sponsor: leidos/ FHWA's Turner Fairbank Highway Research Center
PI: Hong Yang PhD; CoPI: Mecit Cetin, Ph.D.
Description: The overall goal in this project is to develop new machine learning methods to detect incidents from sensor data in real-time. Using micro simulation, numerous scenarios will be created with varying characteristics of incidents and traffic demand conditions. Effectiveness of both traditional (e.g., California algorithms) and AI-based algorithms will be tested in terms of detection rate, false alarm, and detection time.
PI: Hong Yang PhD; CoPI: Mecit Cetin, Ph.D.
Description: The overall goal in this project is to develop new machine learning methods to detect incidents from sensor data in real-time. Using micro simulation, numerous scenarios will be created with varying characteristics of incidents and traffic demand conditions. Effectiveness of both traditional (e.g., California algorithms) and AI-based algorithms will be tested in terms of detection rate, false alarm, and detection time.
Application of Deep Learning Methods to Vehicle Classification
Project title: Feasibility of Estimating Commodity Flows on Highways with Existing and Emerging Technologies
PI: Mecit Cetin, Ph.D.
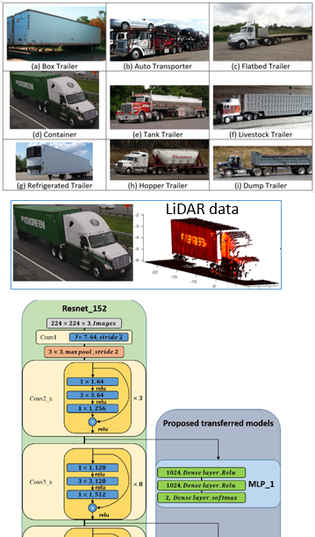
Description: The overall goal in this project is to classify truck body types into subcategories to support estimation of commodity flows and freight modeling. Each unique commodity (e.g., livestock, fuel, machinery, etc.) are hauled in a specific type of trailer. Therefore, if the trailer type can be identified, this will narrow the possible commodity types. The goal of this research project is to determine whether the trailer type can be automatically identified using existing and emerging vehicle detection sensors, e.g., cameras, WIM sensors, LiDAR. Our research team is developing machine learning methods to achieve accurate classification of trailers from large data generated by these sensors.
Related Papers and Presentations:
PI: Mecit Cetin, Ph.D.
Description: The overall goal in this project is to classify truck body types into subcategories to support estimation of commodity flows and freight modeling. Each unique commodity (e.g., livestock, fuel, machinery, etc.) are hauled in a specific type of trailer. Therefore, if the trailer type can be identified, this will narrow the possible commodity types. The goal of this research project is to determine whether the trailer type can be automatically identified using existing and emerging vehicle detection sensors, e.g., cameras, WIM sensors, LiDAR. Our research team is developing machine learning methods to achieve accurate classification of trailers from large data generated by these sensors.
Related Papers and Presentations:
- R. V. Nezafat, B. Salahshour, and M. Cetin, “Classification of truck body types using a deep transfer learning approach”, The IEEE-ITSC, Hawaii, 2018.
- R.V. Nezafat, O. Sahin, and M. Cetin, “Implementation of Transfer Learning for Trailer Type Identification Using Side-Fire LiDAR,” ASCE’s International Conference on Transportation & Development, Pittsburgh, PA, July 15–18, 2018
Estimating Road Inundation Levels Due to Recurrent Flooding from Image Data

Sponsor: MATS UTC/USDOT
PI: Mecit Cetin, Ph.D. CoPIs: Khan M. Iftekharuddin (ODU) and Jon Goodall (UVA)
Description: Overall, this research proposes to develop fundamental methodologies, algorithms, and predictive capabilities to survey and estimate water inundations due to flooding based on image data. Even though the images for this research will primarily be obtained from video surveillance cameras, the principles and methodologies developed will be applicable to other image sources (e.g., from smartphones, social media). Specific research goals are: (i) Collection of a large image dataset to support the estimation of inundation levels; (ii) Development of machine learning algorithms to extract inundation levels from image data; (iii) Evaluation of the accuracy of the algorithms in predicting inundation levels under different conditions; (iv) Development of data-driven (e.g., deep learning) methods for predicting future inundation levels based on various factors (e.g., expected and past rainfall, drainage, topography). After the basic tools are developed, the research team plans to evaluate them based on images collected during an actual flooding event(s) in Norfolk, VA.
Related papers:
PI: Mecit Cetin, Ph.D. CoPIs: Khan M. Iftekharuddin (ODU) and Jon Goodall (UVA)
Description: Overall, this research proposes to develop fundamental methodologies, algorithms, and predictive capabilities to survey and estimate water inundations due to flooding based on image data. Even though the images for this research will primarily be obtained from video surveillance cameras, the principles and methodologies developed will be applicable to other image sources (e.g., from smartphones, social media). Specific research goals are: (i) Collection of a large image dataset to support the estimation of inundation levels; (ii) Development of machine learning algorithms to extract inundation levels from image data; (iii) Evaluation of the accuracy of the algorithms in predicting inundation levels under different conditions; (iv) Development of data-driven (e.g., deep learning) methods for predicting future inundation levels based on various factors (e.g., expected and past rainfall, drainage, topography). After the basic tools are developed, the research team plans to evaluate them based on images collected during an actual flooding event(s) in Norfolk, VA.
Related papers:
- M. A. Witherow, M. I. Elbakary, K. M. Iftekharuddin, and M. Cetin, “Analysis of Crowdsourced Images for Flooding Detection” VipIMAGE 2017 Conference, Porto, Portugal, 18-20 October 2017.
- M. A. Witherow, C. Sazara, I.M. Winter-Arboleda, M. I. Elbakary, M. Cetin, and K. M. Iftekharuddin “Floodwater Detection on Roadways from Crowdsourced Images” in Computer Methods in Biomechanics and Biomedical Engineering: Imaging & Visualization, 2018.
|
|
| ||||||
Identification of a Vehicle’s Route in an Urban Network using Smartphone Based Mobile Sensor Data
Sponsor: MATS UTC/USDOT
PI: Mecit Cetin, Ph.D.
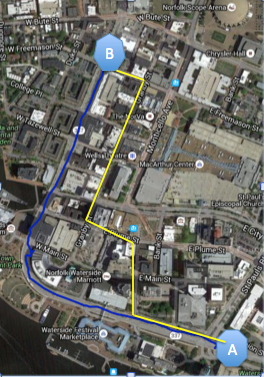
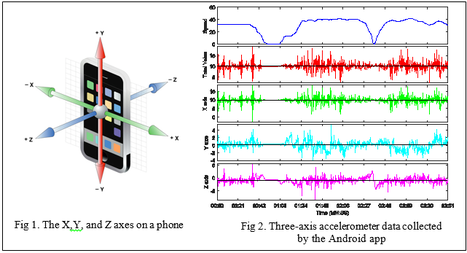
Description: Consumer electronic devices, such as smartphones and tablets, come with various types of sensors including GPS, accelerometer, gyroscope, and compass. Even though vehicle trajectories can be estimated from the GPS data generated by these devices, GSP tracking is not desirable due to privacy issues, high-battery consumption of the GPS receiver, and lack of continuous GPS service in urban networks due to tall buildings and other obstructions. The main objective of this proposed study is to predict a vehicle’s route in an urban network by relying solely on the inertial sensor data from an on-board smartphone or tablet. Assuming that an origin (home) and destination (work) are known, algorithms will be developed to estimate the specific route taken by the vehicle based on the data from inertial sensors. The specific goals of the proposed research are:
1. Using a smartphone app, collect acceleration, gyroscope and magnetometer data in urban networks in the Hampton Roads region.
2. Develop methods to identify a vehicle route through the network using the collected inertial sensors data.
3. Identify key patterns or signatures in the data that are most useful for accurately predicting vehicles’ routes.
PI: Mecit Cetin, Ph.D.
Description: Consumer electronic devices, such as smartphones and tablets, come with various types of sensors including GPS, accelerometer, gyroscope, and compass. Even though vehicle trajectories can be estimated from the GPS data generated by these devices, GSP tracking is not desirable due to privacy issues, high-battery consumption of the GPS receiver, and lack of continuous GPS service in urban networks due to tall buildings and other obstructions. The main objective of this proposed study is to predict a vehicle’s route in an urban network by relying solely on the inertial sensor data from an on-board smartphone or tablet. Assuming that an origin (home) and destination (work) are known, algorithms will be developed to estimate the specific route taken by the vehicle based on the data from inertial sensors. The specific goals of the proposed research are:
1. Using a smartphone app, collect acceleration, gyroscope and magnetometer data in urban networks in the Hampton Roads region.
2. Develop methods to identify a vehicle route through the network using the collected inertial sensors data.
3. Identify key patterns or signatures in the data that are most useful for accurately predicting vehicles’ routes.
Investigating Relationship between Driving Patterns and Traffic Safety using Smartphones Based Mobile Sensor Data
Sponsor: Virginia Department of Transportation (VDOT)
PI: Rajesh Paleti, Ph.D., CoPI: Mecit Cetin
Description: Even though there is plenty of research on correlating safety measures to roadway characteristics and some elements of traffic flow (e.g., AADT, speed), there is no significant literature on analyzing the correlation between high-resolution dynamic speed and/or acceleration data and crash risks along highway segments. Collecting such high-resolution data is now feasible with the mobile consumer devices such as smartphones.
Smartphones are now equipped with sensors capable of recording vehicle performance data at a very fine temporal resolution in a cost-effective way. Moreover, unlike GPS sensors that must be switched on by the user before collecting data, the low-energy inertia sensors within smartphones (accelerometer, gyroscope, and magnetometer) are always on. So, these sensors can provide a rich dataset, i.e., high resolution speed and acceleration profiles, that can be used for identifying unsafe driving patterns. In this context, the objective of the proposed study is to identify unsafe driving patterns using mobile sensor data and explore the relationship between these driving patterns and traffic crash incidences. Once completed, the models developed in this research can be used to develop surrogate safety metrics that indicate the risk associated with different driving patterns.
PI: Rajesh Paleti, Ph.D., CoPI: Mecit Cetin
Description: Even though there is plenty of research on correlating safety measures to roadway characteristics and some elements of traffic flow (e.g., AADT, speed), there is no significant literature on analyzing the correlation between high-resolution dynamic speed and/or acceleration data and crash risks along highway segments. Collecting such high-resolution data is now feasible with the mobile consumer devices such as smartphones.
Smartphones are now equipped with sensors capable of recording vehicle performance data at a very fine temporal resolution in a cost-effective way. Moreover, unlike GPS sensors that must be switched on by the user before collecting data, the low-energy inertia sensors within smartphones (accelerometer, gyroscope, and magnetometer) are always on. So, these sensors can provide a rich dataset, i.e., high resolution speed and acceleration profiles, that can be used for identifying unsafe driving patterns. In this context, the objective of the proposed study is to identify unsafe driving patterns using mobile sensor data and explore the relationship between these driving patterns and traffic crash incidences. Once completed, the models developed in this research can be used to develop surrogate safety metrics that indicate the risk associated with different driving patterns.
Combining Different Data Sources to Predict Origin-Destinations and Flow Patterns for Trucks in Large Networks
|
Sponsor: National Transportation Center - University of Maryland/USDOT
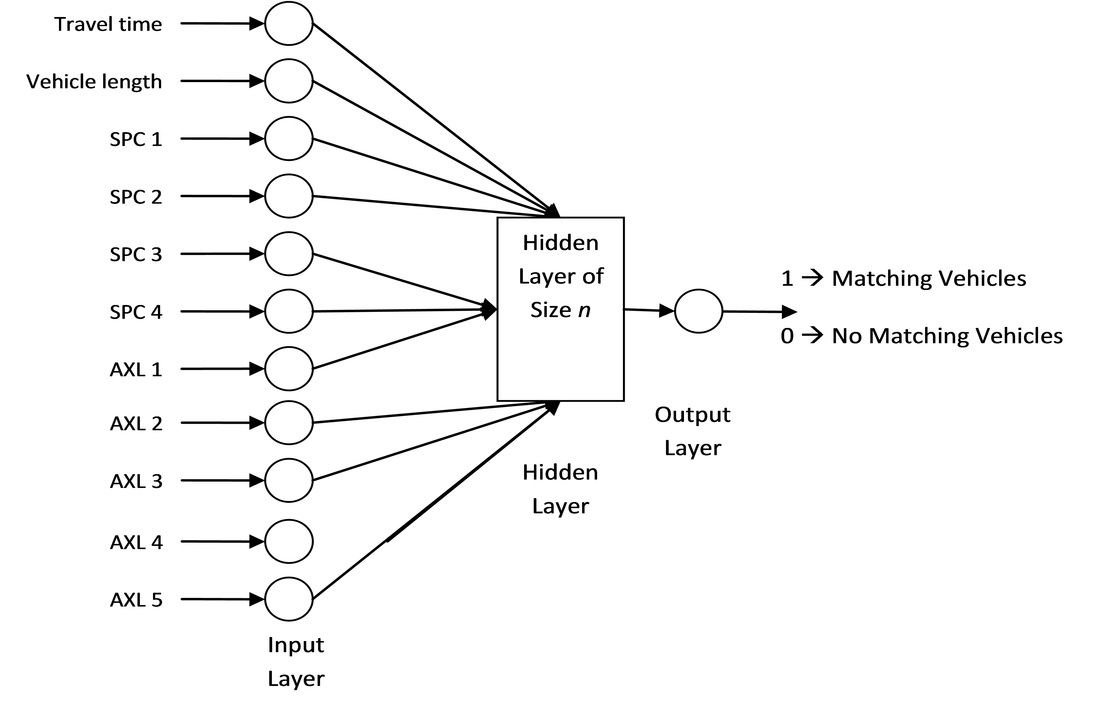
PI: Mecit Cetin, Ph.D. Description: In this project, the research team will develop re- identification models to match vehicles between two WIM (weigh-in-motion) stations. At a typical WIM station, total vehicle length, axle spacing, and axle weights are measured per vehicle basis. Such data are then archived for future use. In addition to data from WIM sensors, the team will assume that travel time information (or variation) between the two sites is available. Such information can be obtained from various sources, including private companies (e.g., INRIX) or estimated from point sensors (e.g., loops, radar) installed along the corridor. The travel time information along with WIM data will be incorporated into algorithms to re-identify trucks |
|
Short-Term Traffic Flow Rate Forecasting Based on Identifying Similar Traffic Patterns
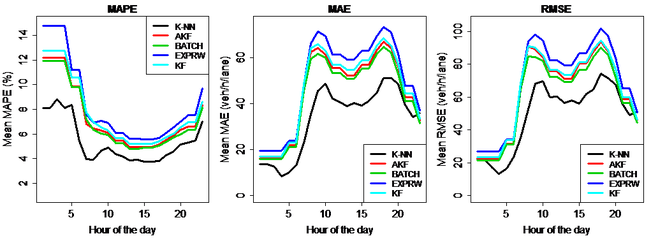
Description: In this paper, we propose a non-parametric and data-driven methodology for short-term traffic forecasting based on identifying similar traffic patterns using an enhanced K-nearest neighbor (K-NN) algorithm. Weighted Euclidean distance, which gives more weight to recent measurements, is used as a similarity measure for K-NN. Moreover, winsorization of the neighbors is implemented to dampen the effects of dominant candidates, and rank exponent is used to aggregate the candidate values. Robustness of the proposed method is demonstrated by implementing it on large datasets collected from different regions and by comparing it with advanced time series models, such as SARIMA and adaptive Kalman Filter models proposed by others. It is demonstrated that the proposed method reduces the mean absolute percent error by more than 25%. In addition, the effectiveness of the proposed enhanced K-NN algorithm is evaluated for multiple forecast steps and also its performance is tested under data with missing values. This research provides strong evidence suggesting that the proposed non-parametric and data-driven approach for short-term traffic forecasting provides promising results. Given the simplicity, accuracy, and robustness of the proposed approach, it can be easily incorporated with real-time traffic control for proactive freeway traffic management.
- F. Habtemichael, and M. Cetin, “Short-Term Traffic Flow Rate Forecasting Based on Identifying Similar Traffic Patterns” Transportation Research Part C, 66, pp. 61-78, 2016.




{kind=link}
{kind=link}
{kind=link}